Strandbeest Robots 
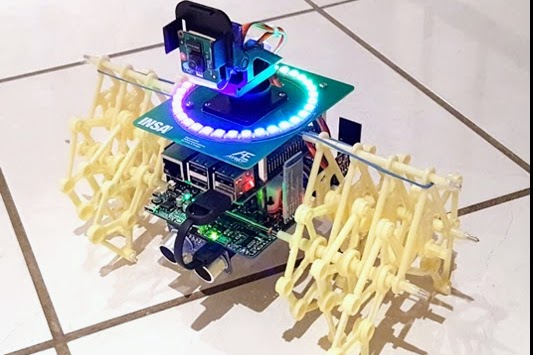
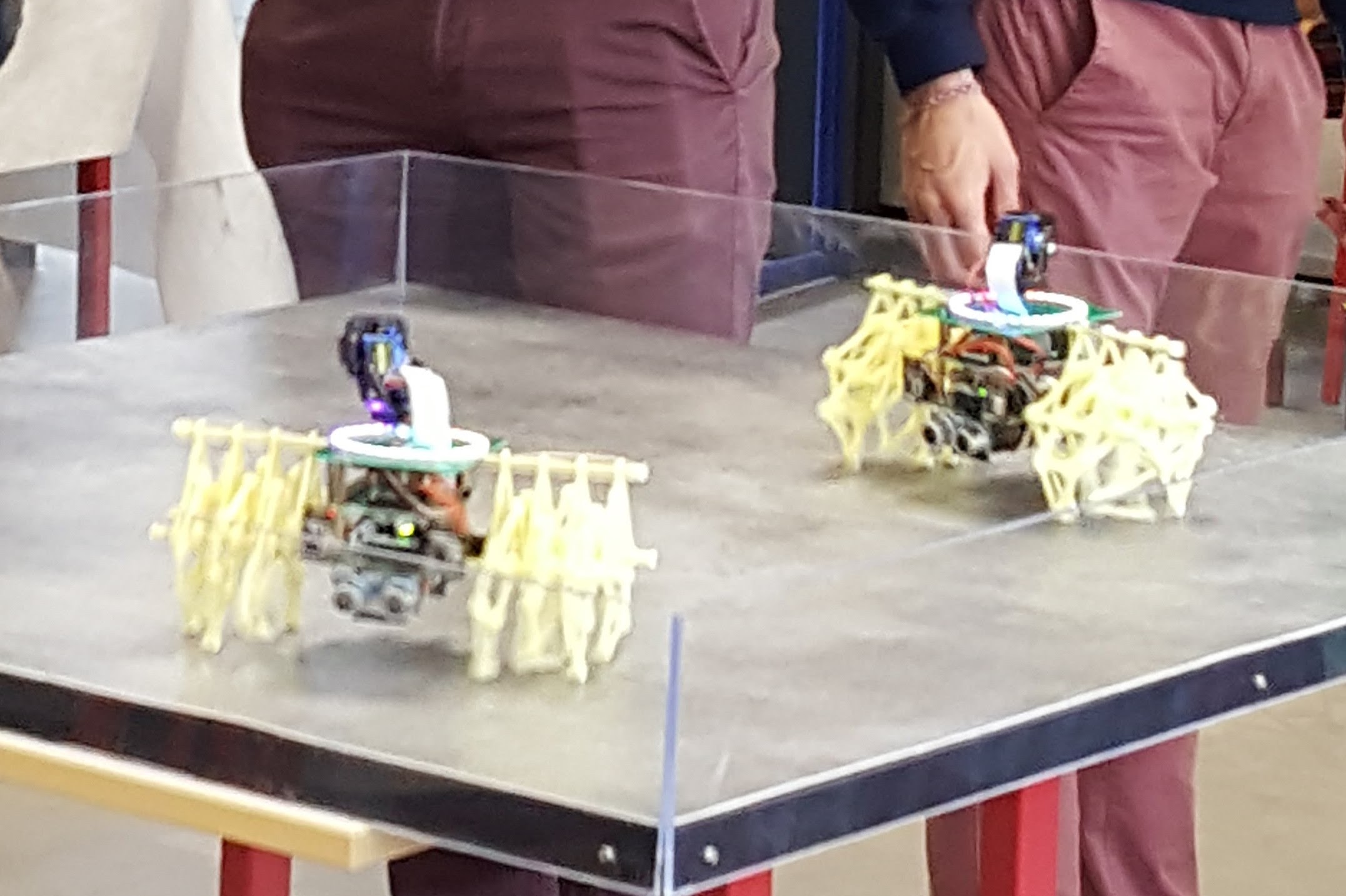
The Strandbeests, creations of the Dutch sculptor Theo Jansen, are giant centipede-like structures that move using the power of the wind source. To blend poetry with technology, I collaborated with Aref Electronique to oversee the design of eight mini strandbeests equipped with motors, which were then made available for our students' projects.
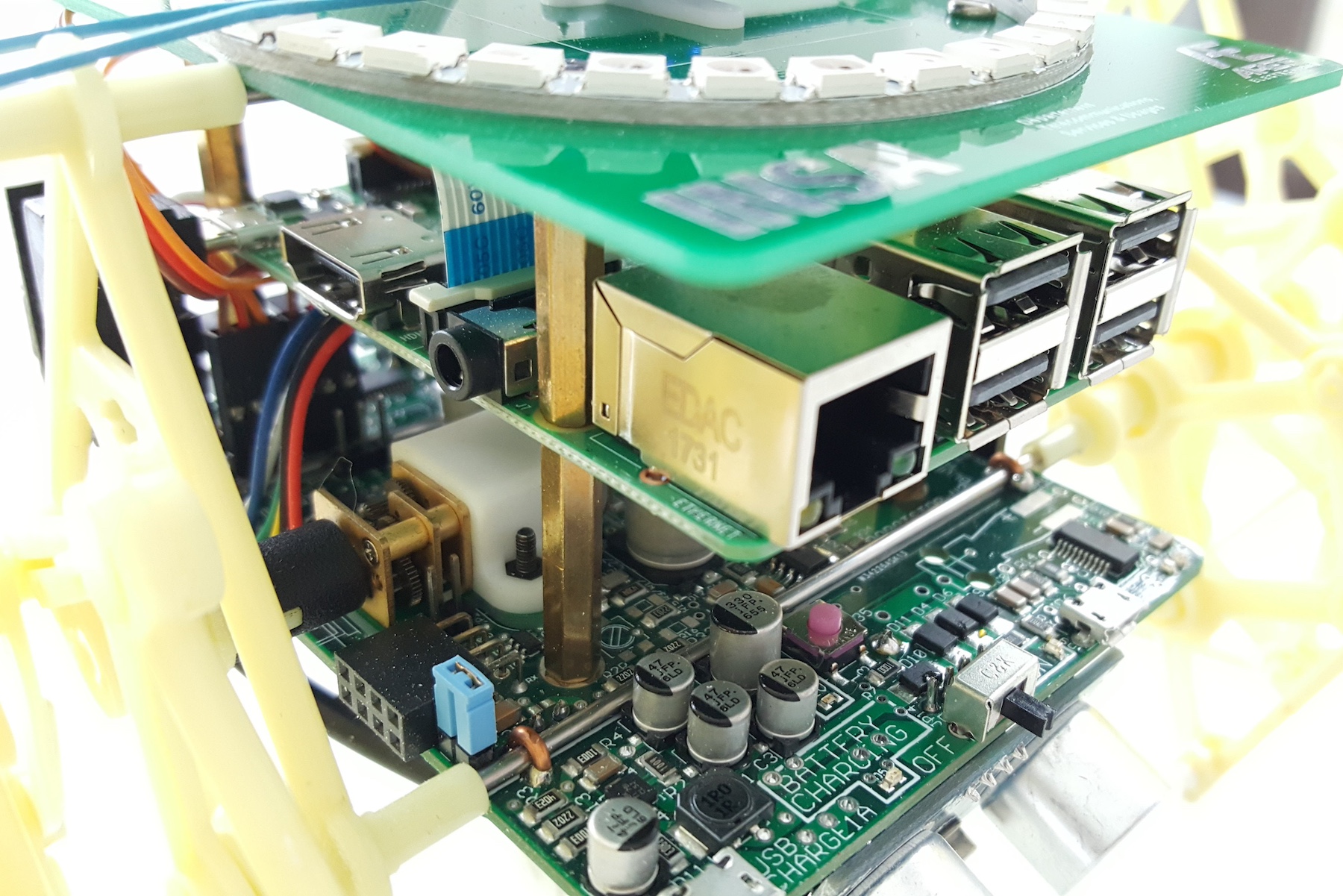
The strandbeest platform consists of an electronic "base" board, equivalent to the Arduino UNO board, equipped with numerous peripherals to control various sensors, as well as two motors and their control devices necessary for the robot's movement. The base board is not a standard Arduino board, but it integrates the same ATMEL ATMega328 processor, configured with the same bootloader. This allows access to the Arduino IDE environment for programming and uploading programs, as well as to all the software resources offered by the Arduino libraries.
The base board has a communication interface with a Raspberry PI3 embedded on the platform, a motorized webcam with its PWM control system, and a multicolored LED ring. It includes motor control, the management of various sensors via I2C bus (ultrasonic, temperature, accelerometer, etc.), communication interfaces (RF24, Bluetooth, WIFI), a USB communication interface with a Raspberry PI3, and a power supply module allowing in-situ battery charging via USB port, avoiding the need for an external charger as with UNO boards. This design is optimized for autonomy.
Additionally, a DWM1001 DEV positioning module can be added. The motors can be controlled wirelessly via Bluetooth using HyperTerminal on PC or smartphone, or by RF24 modules via an Arduino UNO node connected to a PC or smartphone.
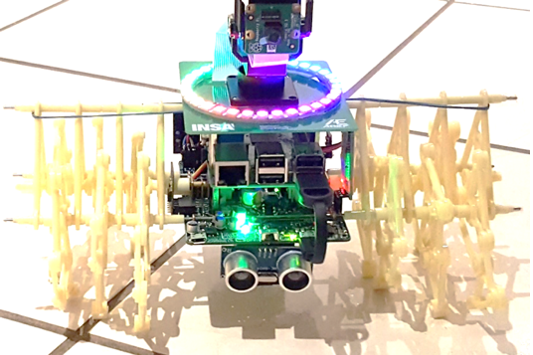
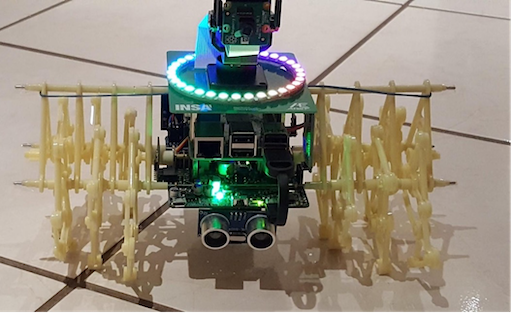
Front side
Front US modules, Raspberry PI board, Multicolored LED ring
Wireless connections
Bluetooth and WIFI modules
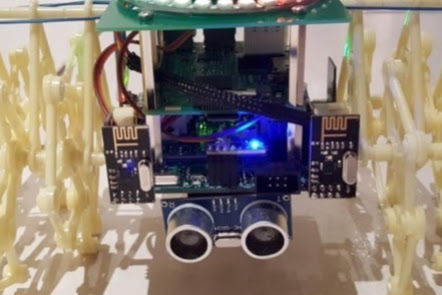
Back side
Back US modules, Bluetooth module, RF24 modules
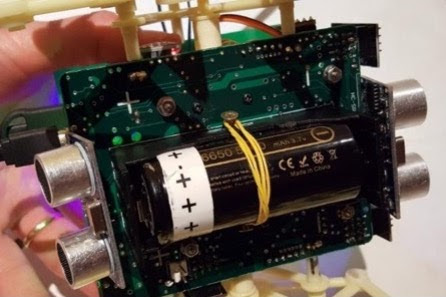
High-Life Battery
Lithium-ion battery (2.8V - 4.2V), voltage boosters: 5V and 12V, 5 Ah

Sensors
Temperature, Humidity, Pressure, Gyroscope/accelerometer
Motors
2 motors, H-Bridge
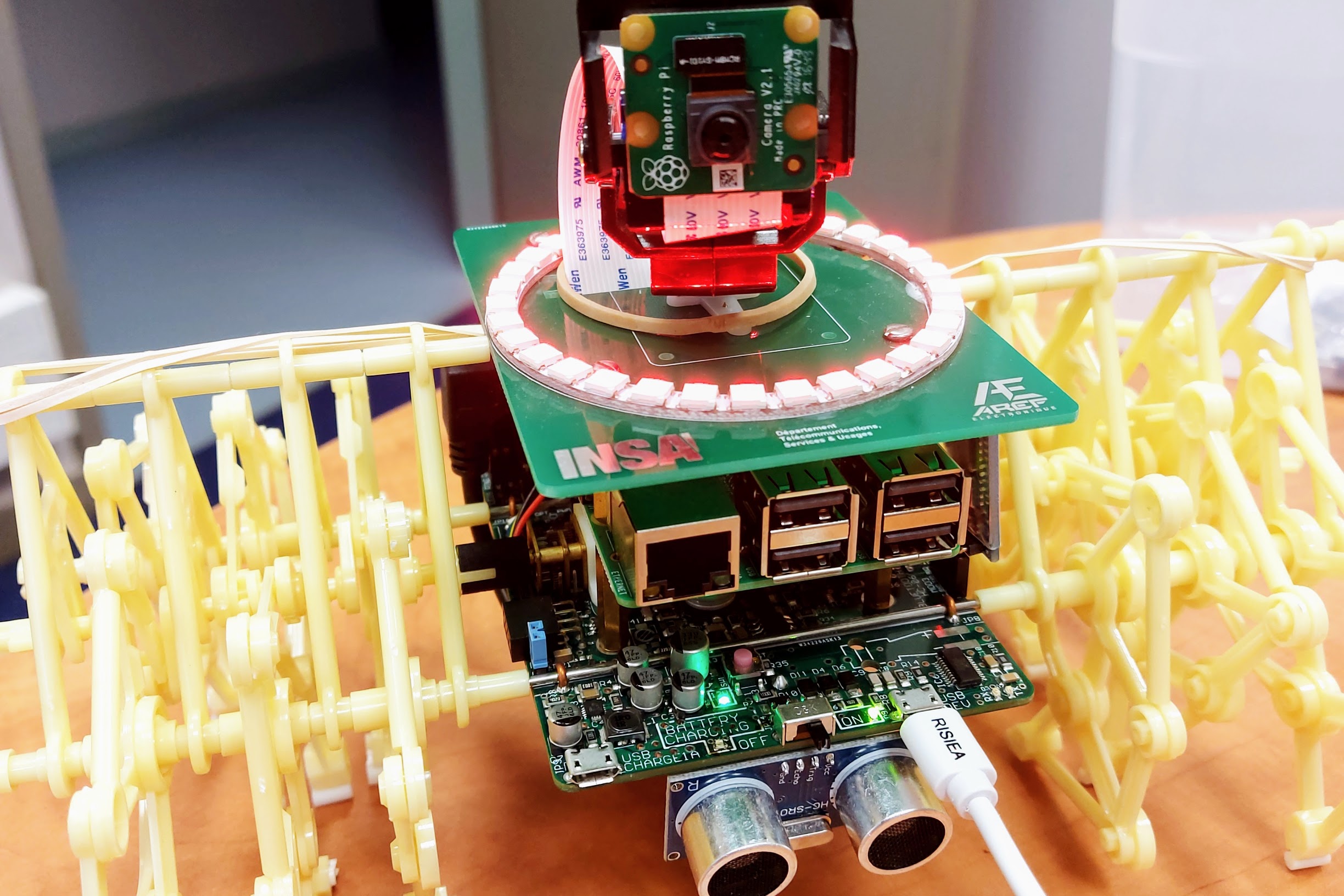
Articulated camera
Raspberry connexion
Cooperative robots
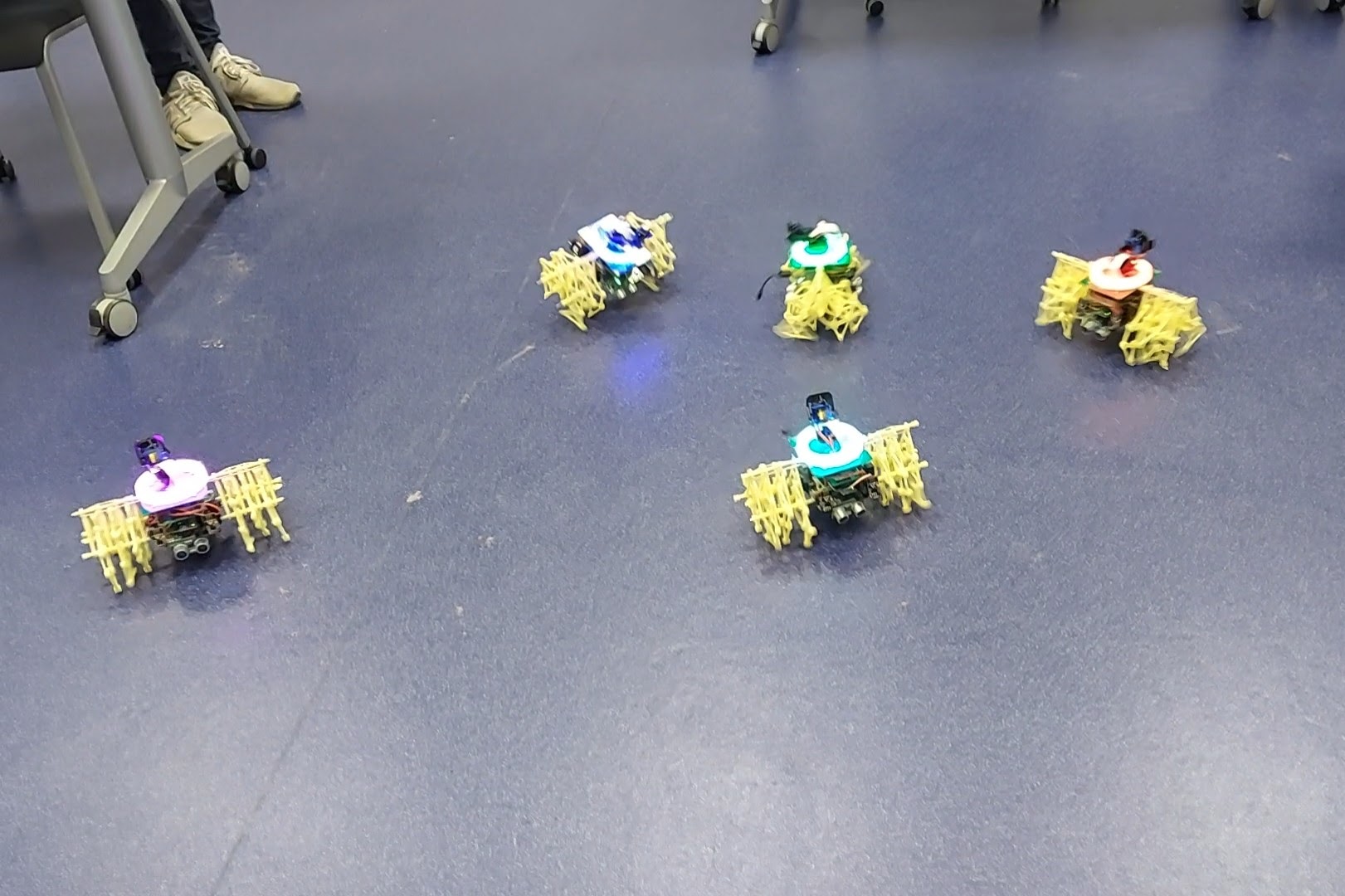
Swarm robotic project
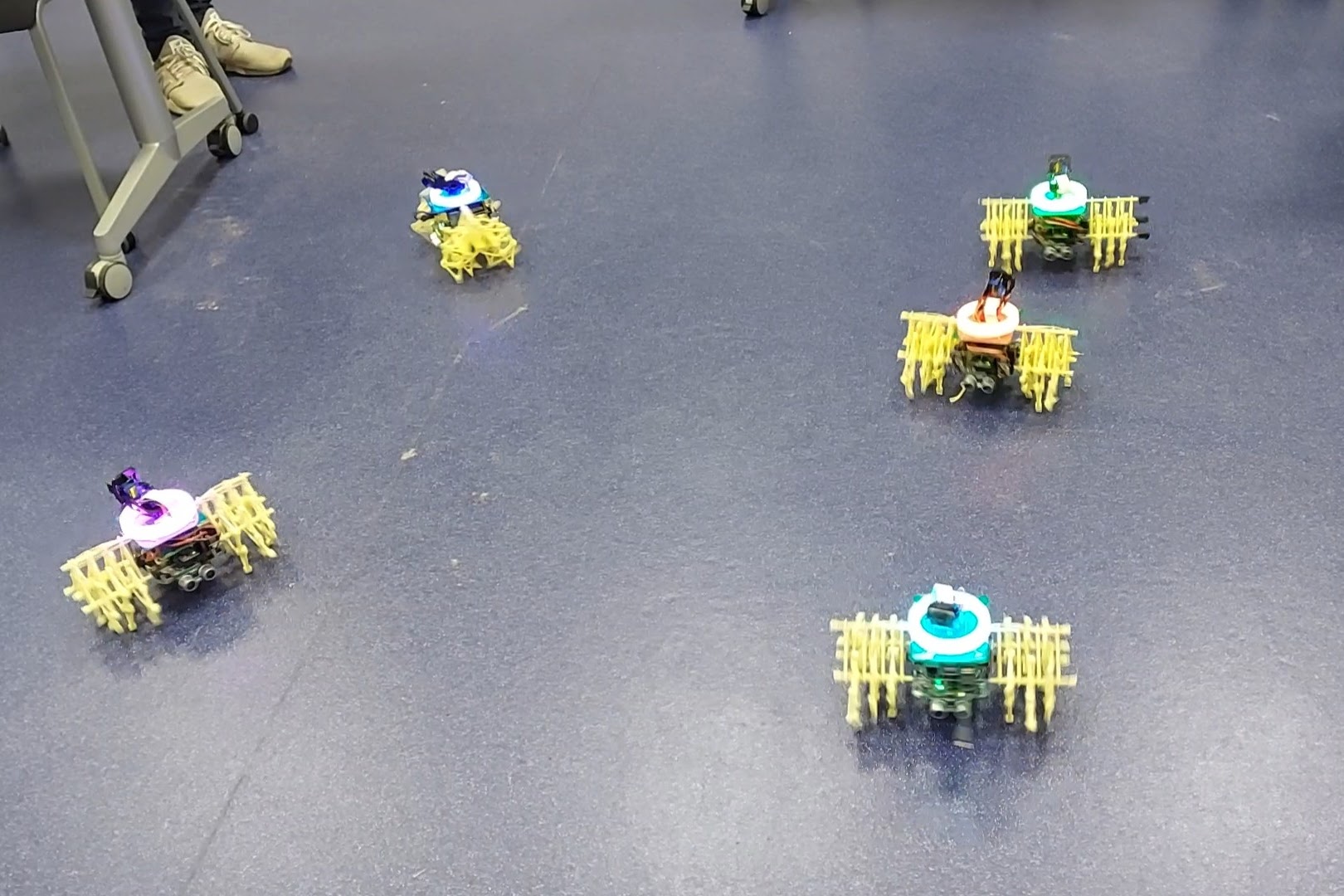
Swarm robotic project
